Visual SLAM-Based Deployment
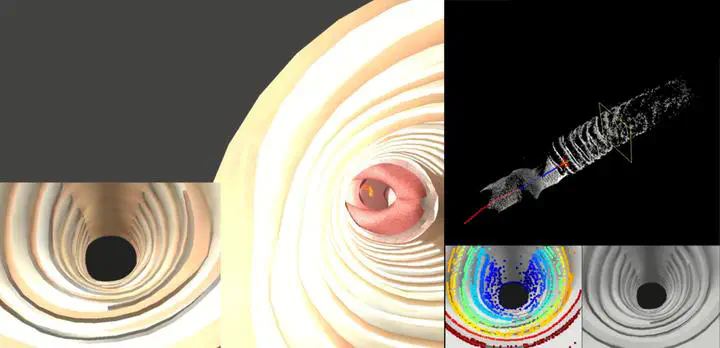
The planning of continuum robots is generally based on the patient’s anatomy using pre-operative images. However, their practical deployment can be challenging. Open-loop approaches are prone to errors due to modeling accuracy or physiological motions of the patient during the procedure, and human-in-the-loop approaches require specific skills from the surgeon. To overcome those limits, we propose an automatic tip-steering approach for concentric tube robots based on visual SLAM (simultaneous localization and mapping).
Cédric Girerd
CNRS Researcher
My research interests include continuum, soft and inflatable robots for medical application and inspection tasks.