Hand-Held and Portable Continuum Robots
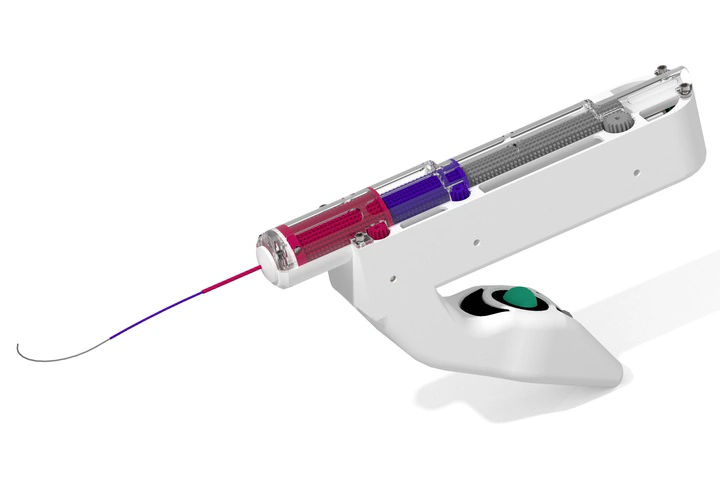
The standard-of-care involves a range of affordable, manual, hand-held rigid tools, with limited dexterity. In contrast, roboticized tools with increased accessibility and dexterity are usually larger, heavier, grounded devices that are teleoperated, posing a new set of challenges. To bridge the gap between those classes of devices, we propose a hand-held concentric tube robot that has the dexterity and precision of large roboticized devices, while maintaining the footprint of a traditional hand-held tool.
Cédric Girerd
CNRS Researcher
My research interests include continuum, soft and inflatable robots for medical application and inspection tasks.