Design and Control of a Hand-Held Concentric Tube Robot for Minimally Invasive Surgery
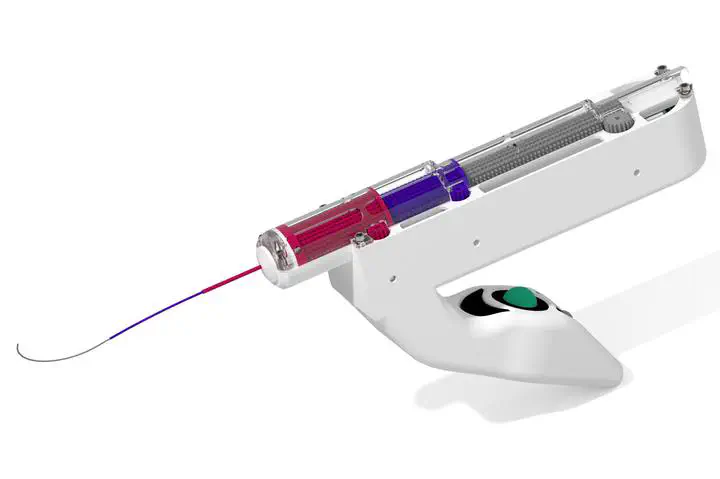 Image credit: Unsplash
Image credit: Unsplash
Abstract
Minimally invasive surgery is of high interest for interventional medicine since the smaller incisions can lead to less pain and faster recovery for patients. The current standard-of-care involves a range of affordable, manual, hand-held rigid tools, whose limited dexterity and range of adoptable shapes can prevent access to confined spaces. In contrast, recently developed roboticized tools that can provide increased accessibility and dexterity to navigate and perform complex tasks often come at the cost of larger, heavier, and grounded devices that are teleoperated, posing a new set of challenges. In this article, we propose a new hand-held concentric tube robot with an associated position control method that has the dexterity and precision of large roboticized devices, while maintaining the footprint of a traditional hand-held tool. The device shows human-in-the-loop control performance that meets the requirements of the targeted application, percutaneous abscess drainage. In addition, a small user study illustrates the advantage of combining rigid body motion of the device with more precise motions of the tip, thus showing the potential to bridge the gap between traditional hand-held tools and grounded robotic devices.
Cédric Girerd
CNRS Researcher
My research interests include continuum, soft and inflatable robots for medical application and inspection tasks.