Concentric Tube Robot Design Optimization
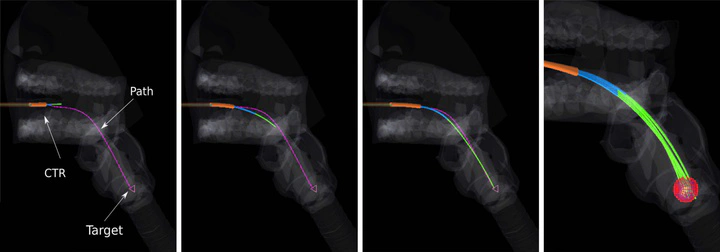
Concentric tube robots have a large number of design variables, which is often reduced in order for design optimization problems to be tractable by gradient-free approaches. However, this reduces the design space of the robots, which can lead to sub-optimal results. To overcome those limitations, we propose a design optimization problem formulation compatible with grandient-based methods, allowing us to explore a larger design space.
Cédric Girerd
CNRS Researcher
My research interests include continuum, soft and inflatable robots for medical application and inspection tasks.