Multi-backbone Continuum Robots
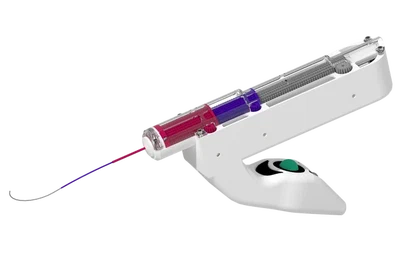
Overview Navigating tortuous anatomical pathways, such as the aortic arch, requires continuum robots capable of complex three-dimensional deformations. Existing designs are often …
Overview Navigating tortuous anatomical pathways, such as the aortic arch, requires continuum robots capable of complex three-dimensional deformations. Existing designs are often …
Overview A new subclass of soft robot, known as tip-extending or “vine” robots, consists of long inflatable devices that move through the environment by extending from the tip. A …
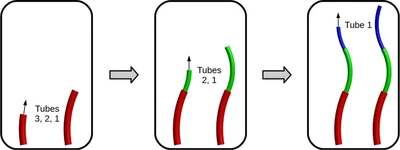
Overview Concentric tube robots have a large number of design variables, which is often reduced in order for design optimization problems to be tractable by gradient-free …
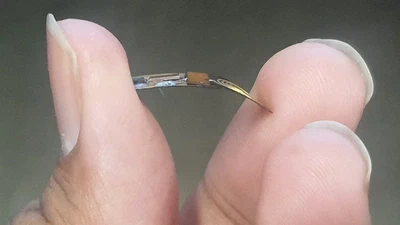
Overview The ability to sense forces is a critical component for ensuring that robots can safely interact with their environment. Yet there are numerous situations, in particular …
Overview The standard-of-care involves a range of affordable, manual, hand-held rigid tools, with limited dexterity. In contrast, roboticized tools with increased accessibility and …
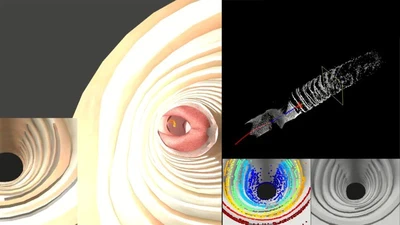
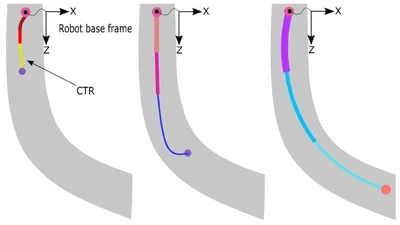
Overview The planning of continuum robots is generally based on the patient’s anatomy using pre-operative images. However, their practical deployment can be challenging. Open-loop …
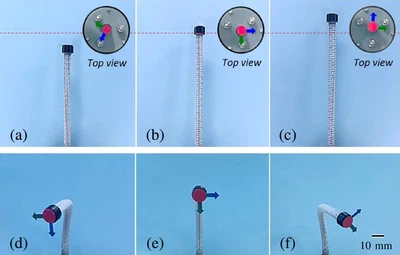
Overview The particular architecture of concentric tube robots leads to lateral motions of their bodis while their tips are controlled. Such behavior can be undesired for …