Wireless Sensors
Mar 28, 2023· ·
2 min read
·
2 min read
Cédric Girerd
Overview
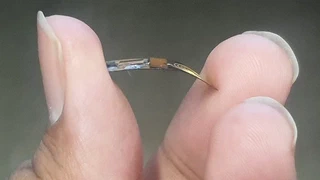
The ability to sense forces is a critical component for ensuring that robots can safely interact with their environment. Yet there are numerous situations, in particular for medical applications, where environmental and sensor density requirements can pose challenges to sensor design. To overcome those limitations, we proposed new wireless force sensors.
Publications
(2023).
ForceSticker: Wireless, Batteryless, Thin & Flexible Force Sensors.
In ACM IMWUT.
(2021).
Expanding the horizons of wireless sensing: Sensing and localizing contact forces with signal reflections.
In GetMobile.
(2021).
Towards a Wireless Force Sensor Based on Wave Backscattering for Medical Applications.
IEEE Sensors Journal.

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar in the Morimoto Lab at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.