SLAM-Based Deployment
Oct 29, 2020· ·
1 min read
·
1 min read
Cédric Girerd
Overview
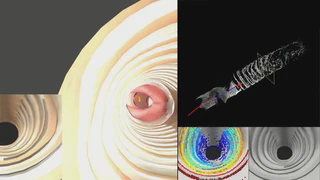
The planning of continuum robots is generally based on the patient’s anatomy using pre-operative images. However, their practical deployment can be challenging. Open-loop approaches are prone to errors due to modeling accuracy or physiological motions of the patient during the procedure, and human-in-the-loop approaches require specific skills from the surgeon. To overcome those limits, we propose an automatic tip-steering approach for concentric tube robots based on visual SLAM (simultaneous localization and mapping).
Publications

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.