Multi-backbone Continuum Robots
Sep 12, 2025· ·
1 min read
·
1 min read
Cédric Girerd
Overview
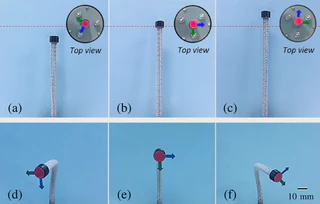
Navigating tortuous anatomical pathways, such as the aortic arch, requires continuum robots capable of complex three-dimensional deformations. Existing designs are often limited to specific curve families, and extending their shape capabilities usually increases mechanical complexity and system size. In this paper, we present a novel hybrid continuum robot that combines a multi-backbone structure with a flexible notched tube. Control rods enable bending, compression, and extension, while the tube’s structural modifications induce torsion along the backbone. This allows the robot to achieve both planar and helical shapes in a compact form factor.
Publications
(2026).
Helical and Planar Continuum Robot Shapes by Structural Tube Modifications and Backbone Length Control.
RA-L.
(2024).
Tendon-Driven vs Rod-Driven Continuum Robots: A Bench Test Evaluation.
In CRAS.

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.