Follow-the-Leader Deployment
Aug 18, 2020· ·
2 min read
·
2 min read
Cédric Girerd
Overview
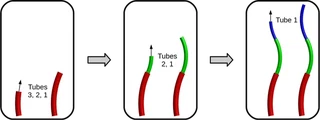
The particular architecture of concentric tube robots leads to lateral motions of their bodis while their tips are controlled. Such behavior can be undesired for deployment in constrained areas. In order to overcome this challenge, we worked on the follow-the-leader deployment of those robots, during which the robot body follows the path taken by its tip.
Publications
(2020).
Design of Concentric Tube Robots using Tube Patterning for Follow-the-Leader Deployment.
JMR.
(2018).
In Vivo Inspection of the Olfactory Epithelium: Feasibility of Robotized Optical Biopsy.
ABME.
(2018).
Conception de robots à tubes concentriques et application à l'inspection des cellules olfactives.
In University of Strasbourg.
(2017).
Toward a Robotized Inspection of the Olfactory Epithelium.
In Surgetica.
(2017).
Towards Optical Biopsy of Olfactory Cells using Concentric Tube Robots with Follow-the-Leader Deployment.
In IROS.
(2017).
Combining Tube Design and Simple Kinematic Strategy for Follow-the-Leader Deployment of Concentric Tube Robots.
In ARK.
(2016).
Synthesis of a New Concentric Tube Robot for Olfactory Cells Exploration.
In CRAS.

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar in the Morimoto Lab at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.