CTR Design Optimization
Sep 2, 2024· ·
1 min read
·
1 min read
Cédric Girerd
Overview
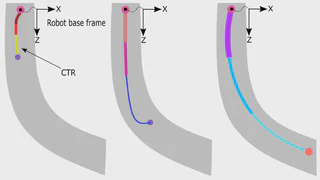
Concentric tube robots have a large number of design variables, which is often reduced in order for design optimization problems to be tractable by gradient-free approaches. However, this reduces the design space of the robots, which can lead to sub-optimal results. To overcome those limitations, we propose a design optimization problem formulation compatible with grandient-based methods, allowing us to explore a larger design space.
Publications
(2024).
Closing the Loop on Concentric Tube Robot Design: A Case Study on Micro-Laryngeal Surgery.
TBME.

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.