Compact Continuum Robots
Dec 25, 2020· ·
1 min read
·
1 min read
Cédric Girerd
Overview
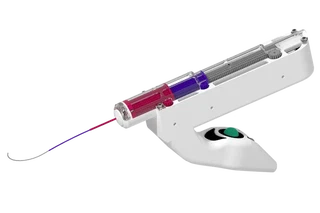
The standard-of-care involves a range of affordable, manual, hand-held rigid tools, with limited dexterity. In contrast, roboticized tools with increased accessibility and dexterity are usually larger, heavier, grounded devices that are teleoperated, posing a new set of challenges. To bridge the gap between those classes of devices, we propose a hand-held concentric tube robot that has the dexterity and precision of large roboticized devices, while maintaining the footprint of a traditional hand-held tool.
Publications

Authors
CNRS Researcher
I am a CNRS Researcher in Robotics. I work in the DEXTER Team in the Robotics Department at LIRMM in Montpellier, France. I obtained a PhD from Strasbourg University in 2018 in Robotics, and was a Postdoctoral Scholar in the Morimoto Lab at the University of California San Diego from 2019 to 2022. Since 2023, I am an Associate Editor for the IEEE RoboSoft Conference.