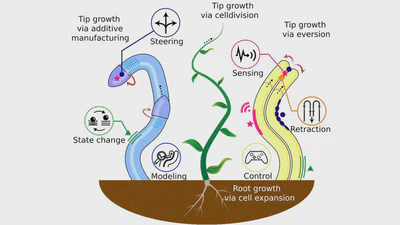
Tip-Growing Robots: Design, Theory, Application
Growing robots apically extend through material eversion or deposition at their tip. This endows them with unique capabilities such as follow the leader navigation, long-reach, …
Shamsa al harthy
Growing robots apically extend through material eversion or deposition at their tip. This endows them with unique capabilities such as follow the leader navigation, long-reach, …

Vine robots are soft robots that translate by everting, or growing, from their tips. This mechanism of translation minimizes the application of shear forces on the environment, …
Concentric tube robots (CTRs) are well-suited to address the unique challenges of minimally invasive surgical procedures due to their small size and ability to navigate highly …
A new subclass of soft robot, known as tip-extending or ``vine'' robots, consists of long inflatable devices that move through the environment by extending from the tip. A key …
Many design optimization problems include constraints to prevent intersection of the geometric shape being optimized with other objects or with domain boundaries. When applying …
Any two objects in contact with each other exert a force that could be simply due to gravity or mechanical contact, such as any ubiquitous object exerting weight on a platform or …

Concentric tube robots (CTRs) have drawn significant research attention over the years, particularly due to their applications in minimally invasive surgery (MIS). Indeed, their …
Soft suction cups have been proposed for many applications, including manipulating soft tissues and measuring mechanical properties of the skin. Models that can predict the …
Continuum robots offer many advantages for navigation in constrained environments, due to their flexible backbone and ability to conform to complex shapes. However, their …
Concentric tube robots (CTRs) show particular promise for minimally invasive surgery due to their inherent compliance and ability to navigate in constrained environments. Due to …