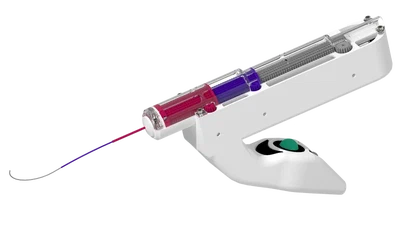
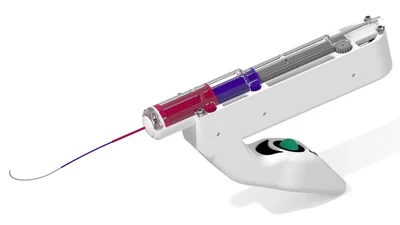
A Hybrid Concentric Tube Robot for Cholesteatoma Laser Surgery
This letter presents a hybrid concentric tube robot which covers the middle ear volume for exhaustive ablation of residual cholesteatoma. The proposed robotic system combines a …
dang-viet-anh-nguyen