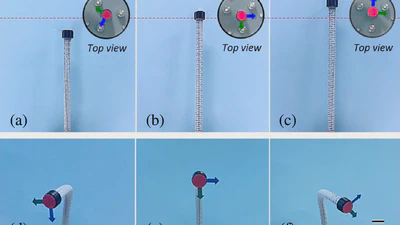
Helical and Planar Continuum Robot Shapes by Structural Tube Modifications and Backbone Length Control
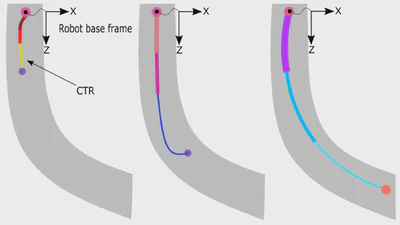
Navigating tortuous anatomical pathways, such as the aortic arch, requires continuum robots capable of complex three-dimensional deformations. Existing designs are often limited to …